Historia aparatów sprężynowych ma swój początek w 1949 r., kiedy – na zjeździe ortopedów szczękowych – zaprezentowano aparaty Bimlera. Ich budowa oparta jest na zgryzie konstrukcyjnym, a połączenie górnej i dolnej części za pomocą sprężystego drutu umożliwiło większy zakres ruchów żuchwy i wykorzystanie wszystkich mięśni.
Wśród zalet aparatów sprężynowych wymienia się przede wszystkim ich nieduże rozmiary (są mniejsze niż aktywatory) i sprężystość pobudzającą pracę mięśni. W założeniach miały wykorzystywać nie tylko siłę mięśni żucia, ale też mięśni warg i języka (pozwalać mówić, połykać itd.). Do wad zaliczyć należy pękanie drutów i podatność na odkształcenia, co może wymagać stosunkowo częstych napraw lub wymiany aparatu.
Aparaty Bimlera
Bimler wyróżnił trzy główne typy aparatów:
- A – przeznaczone do leczenia tyłozgryzów
- B – do leczenia zgryzów głębokich z zachowaniem I klasy trzonowcowej
- C – do leczenia przodozgryzów.
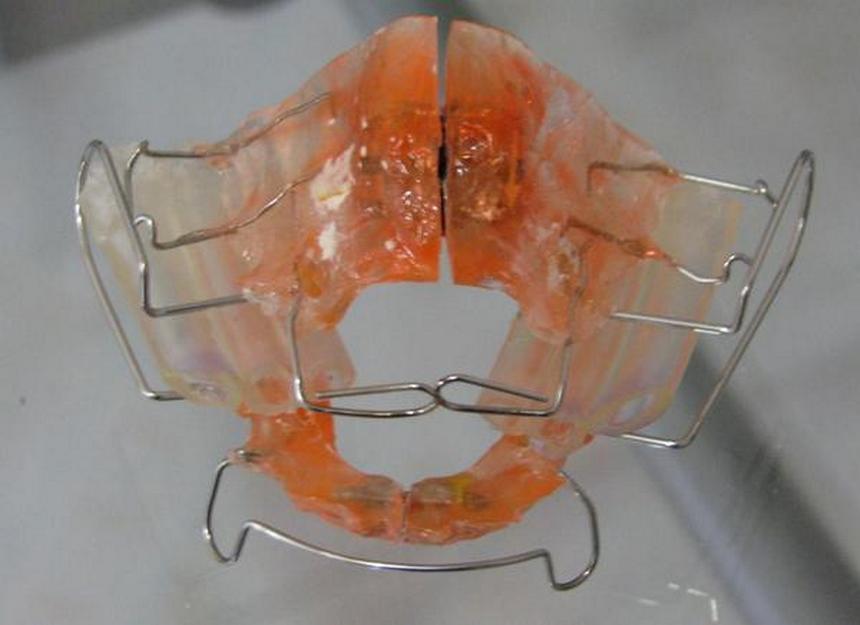
Podstawowa wersja typu A cechuje się najlżejszą konstrukcją. Elementy druciane są połączone z dwoma akrylowymi skrzydełkami podniebiennymi (obejmującymi kły i zęby boczne szczęki) i z akrylową pelotką ulokowaną przed dolnymi siekaczami. Skrzydełka akrylowe łączy druciany łuk wargowy, który opiera się na siekaczach górnych. Od strony podniebiennej ze skrzydełkami łączą się dwie sprężynki powrotne, które mogą hamować nacisk języka lub (w trakcie nagryzania na aparat) skracać siekacze górne i dolne. Druciany, dogięty łuk dolny biegnie w okolicy siekaczy dolnych, przechodzi na stronę języka między pierwszym a drugim przedtrzonowcem, dociera do kła dolnego, biegnie wzdłuż szyjek zębów bocznych, a przy pierwszych trzonowcach tworzy pętlę ku górze i wnika w skrzydełka podniebienne, łącząc górną i dolną część aparatu.
Typ C aparatu (do leczenia doprzednich wad zgryzu) w pierwszych trzech wersjach wyposażony jest w płytę górną i płytę akrylową dolną z drutami przylegającymi do powierzchni żujących pierwszych trzonowców dolnych. Siekacze górne podpierają dwie sprężynki powrotne. Łuk wargowy tworzy pętlę skierowaną ku górze, schodzi ku dołowi i w okolicy siekaczy dolnych ulega zagięciu, by przejść na drugą stronę.
 Ryc. 1. Aparat Bimlera
Ryc. 1. Aparat Bimlera
Większość odmian aparatów Bimlera można aktywować przez stosowne przeginanie tylnych pętli, które łączą górną i dolną część aparatu. Bimler zaleca nosić aparat całą dobę (z wyjątkiem jedzenia). Wielu autorów zaznacza, że aparaty te znajdują zastosowanie przede wszystkim w leczeniu wad niepowikłanych innymi patologiami.
Kinetor Stockfischa i aparaty Karłowskiej
Kinetor Stockfischa (opisany w 1953 r.) to aparat, który wykorzystuje pracę mięśni układu stomatognatycznego za pomocą zastosowanych pętli policzkowych i pętli językowych. Zbudowany jest z płyt akrylowych (górnej i dolnej) ustawionych w zgryzie konstrukcyjnym, połączonych obustronnie pętlami z drutu, przebiegającymi w odległości 2 mm od zębów bocznych. Z płyty dolnej z dwóch stron wychodzą podłużne pętle, na które wciąga się gumowe wężyki stymulujące pacjenta do nagryzania na aparat. W górnej i dolnej płycie znajdują się specjalne śruby (do poszerzania), a różnorodne sprężynki pomagają dokonywać zmian w ustawieniu zębów przednich. Przeginanie pętli policzkowych umożliwia uzyskanie wzajemnego przesunięcia płyt i aktywację aparatu.
 Ryc. 2. Kinetor Stockfischa
Ryc. 2. Kinetor Stockfischa
Aparaty Karłowskiej (opisane w 1959 r.) służą przede wszystkim do leczenia przednio-tylnych wad zgryzu.
Typ A – do leczenia tyłozgryzów – pozwala intensywnie ćwiczyć mięśnie wysuwające żuchwę. Typ B – do leczenia przodozgryzów – wzmacnia mięśnie cofające żuchwę. Działanie tego rodzaju umożliwiają specjalne sprężyny łączące płyty aparatu.
Aparat typu A, stosowany w leczeniu tyłozgryzu i tyłożuchwia, zbudowany jest z płyty dolnej z dwiema klamrami z drutu na pierwsze trzonowce oraz z płyty górnej z dwiema sprężynami coffina i łukiem wargowym (z drutu).
Aparat typu B (do leczenia przodozgryzu i przodożuchwia) ma nieco inną budowę niż typ A. Inny jest przebieg sprężyn łączących płyty; zmieniono górny łuk wargowy na dolny, dodano również klamry Adamsa (z drutu) na drugie przedtrzonowce górne.
Najlepsze efekty leczenia można uzyskać, stosując aparat Karłowskiej całodobowo. Jest to jednak trudne do uzyskania, dlatego zwykle zaleca się noszenie aparatu powyżej 14 godzin na dobę.
wiesz, że...
dentysta.eu
- Ostatni dzwonek, aby tanio wymienić plomby amalgamatowe na lepsze i zdrowsze
- Co pacjenci sądzą o dentystach i jak (nie)wiele na ten temat wiedzą stomatolodzy
- Zapowiedź wyników badania – czego oczekują pacjenci i co dentyści wiedzą o pacjentach
- Pacjenci – widma prześwietleni: wyniki ankiety o umawianiu wizyt
- Wyniki ankiety „Uśmiech a status społeczny”
forum
u nas!
 Wysoka odwiedzalność serwisu sprawia że bez problemu dotrzesz do swoich nowych klientów!
Wystarczy że dodasz swój gabinet w ogłoszeniach portalu - szybko i zupełnie za darmo!
Dzięki promowaniu zyskają również Twoi klienci którzy łatwo Cię odnajdą!
Nadal się wahasz? Kliknij:
Dowiedz się więcej
Rozwiń
Wysoka odwiedzalność serwisu sprawia że bez problemu dotrzesz do swoich nowych klientów!
Wystarczy że dodasz swój gabinet w ogłoszeniach portalu - szybko i zupełnie za darmo!
Dzięki promowaniu zyskają również Twoi klienci którzy łatwo Cię odnajdą!
Nadal się wahasz? Kliknij:
Dowiedz się więcej
Rozwiń